|
You are here :
Control System Design - Index | Book Contents |
Appendix C
| Section C.2
C. Results from Analytic Function Theory
C.2 Independence of Path
Consider functions of two independent variables,  and
and  .
(The
reader can think of
as the real axis and
as the imaginary
axis.) .
(The
reader can think of
as the real axis and
as the imaginary
axis.)
Let  and
and  be two functions of
and ,
continuous
in some domain
be two functions of
and ,
continuous
in some domain  .
Say we have a curve .
Say we have a curve  in ,
described by the
parametric equations
in ,
described by the
parametric equations
 |
(C.2.1) |
We can then define the following line integrals along the path from point  to point
to point  inside .
inside .
Definition C.1
The line integral
 is said to be independent of the
path in if, for every pair of points and in , the
value of the integral is independent of the path followed from to . is said to be independent of the
path in if, for every pair of points and in , the
value of the integral is independent of the path followed from to .

We then have the following result.
Theorem C.1
If
is independent of the path in , then there
exists a function  in such that in such that
 |
(C.2.4) |
hold throughout . Conversely, if a function can
be found such that (C.2.4) hold, then
is independent of the path.
Proof
Suppose that the integral is independent of the path in .
Then,
choose a point  in
and let
be defined as
follows
in
and let
be defined as
follows
 |
(C.2.5) |
where the integral is taken on an arbitrary path in joining
and  .
Because the integral is
independent of the path, the integral does indeed depend only on
and defines the function .
It remains to establish
(C.2.4). .
Because the integral is
independent of the path, the integral does indeed depend only on
and defines the function .
It remains to establish
(C.2.4).
Figure C.1:
Integration path
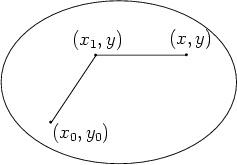 |
For a particular
in ,
choose  so that
so that  and so that the line segment from
to
in is as shown in Figure C.1. Because of independence
of the path,
and so that the line segment from
to
in is as shown in Figure C.1. Because of independence
of the path,
 |
(C.2.6) |
We think of  and
as being fixed while
may vary
along the horizontal line segment. Thus
is being
considered as function of .
The first integral on the
right-hand side of (C.2.6) is then independent of .
and
as being fixed while
may vary
along the horizontal line segment. Thus
is being
considered as function of .
The first integral on the
right-hand side of (C.2.6) is then independent of .
Hence, for fixed ,
we can write
 |
(C.2.7) |
The fundamental theorem of Calculus now gives
 |
(C.2.8) |
A similar argument shows that
 |
(C.2.9) |
Conversely, let (C.2.4) hold for some  .
Then, with .
Then, with
 as a parameter,
as a parameter,
 |
 |
 |
(C.2.10) |
| |
|
 |
(C.2.11) |
| |
|
 |
(C.2.12) |
Theorem C.2
If the integral
is independent of the path in ,
then
 |
(C.2.13) |
on every closed path in . Conversely if (C.2.13) holds
for every simple closed path in , then
is
independent of the path in .
Figure C.2:
Integration path
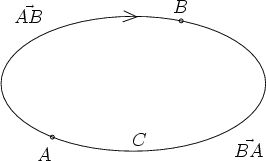 |
Proof
Suppose that the integral is independent of the path. Let
be a
simple closed path in ,
and divide
into arcs  and
and
 as in Figure C.2.
as in Figure C.2.
The converse result is established by reversing the above argument.
Theorem C.3
If and have continuous partial derivatives in and
is independent of the path in , then
 |
(C.2.16) |
Proof
By Theorem C.1, there exists a function
such
that (C.2.4) holds. Equation (C.2.16) follows
by partial differentiation.
Actually, we will be particularly interested in the converse to Theorem C.3. However, this holds under slightly more
restrictive assumptions, namely a simply connected domain.
|