|
You are here :
Control System Design - Index | Book Contents |
Chapter 2
| Section 2.10
2. Introduction to the Principles of Feedback
2.10 Summary
- Control is concerned with finding technically,
environmentally, and commercially feasible ways of acting on a
technological system to control its outputs to desired values
while
ensuring a desired level of performance.
- Fundamental to control engineering is the concept of inversion.
- Inversion can be achieved by a feedback architecture.
- Feedback refers to an iterative cycle of
- quantifying the desired behavior,
- measuring the actual values of relevant system variables by
sensors,
- inferring the actual system state from the
measurements,
- comparing the inferred state to the desired
state,
- computing a corrective action to bring the actual system to the desired
state,
- applying the corrective action to the system via
actuators, and then
- repeating the above steps.
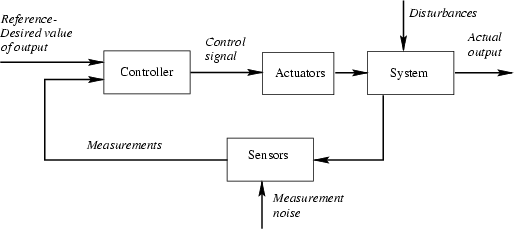
- The principal components in a feedback loop are
shown in Figure 2.12.
Figure 2.12:
Typical feedback loop
 |
- The desired performance is typically quantified on the
following bases:
- accuracy with which the outputs should attain their desired values;
- required tolerance level to inaccurate assumptions,
disturbances and plant changes;
- specification of transients;
- constraints on acceleration, overshoot, energy
consumption, and so forth.
- Control system objectives usually include the following:
- maximization of throughput, speed, yield safety, and more;
- minimization of energy consumption, waste production, emissions, and more;
- decreasing the impact of disturbances, noise uncertainty, time variations, and so forth.
- The chapter gives a first indication that the desired
performance objectives are usually in conflict with each other and
therefore form a network of trade-offs.
- By control-system design we mean the process of
- understanding the trade-off network,
- making deliberate design decisions consistent with these
trade-offs, and
- being able to systematically translate the chosen
goal into a controller.
|