|
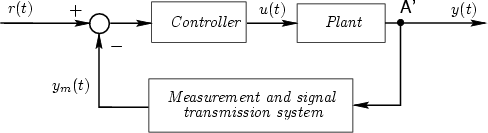
You are here : Control System Design - Index | Book Contents | Chapter 2 | Section 2.9 2. Introduction to the Principles of Feedback2.9 MeasurementsWe have seen that one of the key issues in feedback control is that there must exist suitable measurements to feed back. Indeed, if one can measure a variable, then there is a good chance that one can design a controller to bring it to a desired reference value. A more accurate description of the feedback control loop, including sensors, is shown in Figure 2.11. From this figure, it can be seen that what we actually control is the measured value rather than the true output. These can be quite different.
Hence the measurement system should ideally satisfy requirements such as the following:
In most of the sequel, we will assume that the measurement system is sufficiently good, so that only measurement noise needs to be accounted for. This ideal measurement loop will be known as a unity feedback loop .
|