|
You are here : Control System Design - Index | Book Contents | Chapter 2 | Section 2.3 2. Introduction to the Principles of Feedback
|
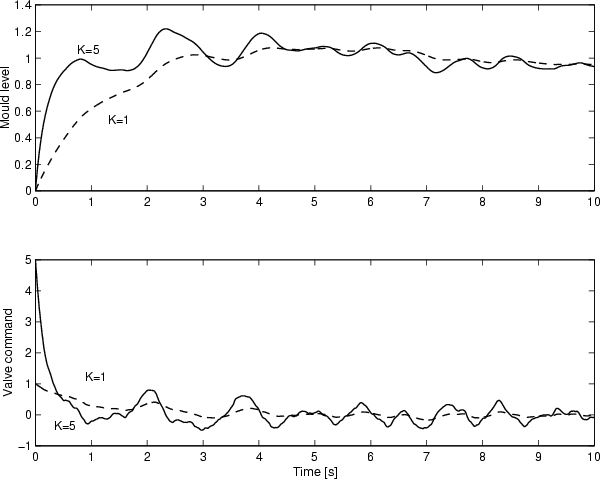 |
Thus, the performance requirements derived in subsection § 2.3.1 appear to be in conflict with each other, at least to some degree.
At this point, a control engineer who does not have a systematic background in control-system design would have a difficult time in assessing whether this conflict is merely a consequence of having such a simple controller or whether it is fundamental. How much effort should be spent in finding a good value for K? Should one choose a more complex controller? Should one spend more effort in modeling the mould-level process?
The remainder of the book is devoted to developing systematic answers to these and other related questions.